
Projekt AluFrost - projekt i budowa końcówki manipulatora robota
Celem było zaprojektowanie i zbudowanie chwytaka do poboru i pozycjonowania detali, które będą poddane zmianie krzywizny czyli po prostu gięte.
Zadaniem będzie podniesienie ze stosu włożenie do giętarki w różnych pozycjach, a następnie odłożenie na ustalone miejsce. W tym przypadku konieczne było zastosowanie chwytaka hybrydowego próżniowo-mechanicznego, ponieważ detal pobieraliśmy ze stosu (ssawki), a podanie pod giętarkę realizowane jest za pomocą chwytaków firmy Schunk.
ETAP 1
Dostaliśmy do testów detale z prośbą o zaprojektowanie chwytaka

ETAP 2
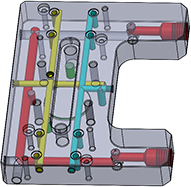
Po zaakceptowaniu wstępnego projektu klient postanowił, że trzeba zaprojektować go tak, aby nie było żadnych połączeń zewn. (przewodów).
W związku z tym w płycie mocującej wszystkie połączenia wykonane są wewnątrz płyty, a byliśmy mocno ograniczeni jej grubością i wagą.

Etap 3
Chwytak zaprojektowany gotowy do budowy, ale pojawiło się kolejne wymaganie klienta:
“Musimy mieć możliwość szybkiej wymiany końcówki”
W związku z tym zastosowaliśmy niezawodny układ wymiany SHS firmy Schunk, ale musieliśmy jeszcze zaprojektować detal pod złącze elektryczne.


Etap 4
Chwytak gotowy do pracy


